|
|
|
|


|
|
|
|
|
|
|
|
ООО НПФ Севекс Еременко С.В.
При цитировании или
копировании
Прошу ссылаться на источник.
Спасибо.
Математическая модель
состояния
воздушной среды
инкубационной камеры.
Воздушная среда инкубационной камеры является сложной динамической системой с распределенными параметрами. Но ее состояние при управлении оценивается по значениям температуры и влажности в одной точке пространства размещения яиц и, как показывают опытные данные, в результате интенсивного перемешивания воздуха изменения названных параметров происходят, если и не одинаково, то, практически, одновременно по всему объему этого пространства. Поэтому динамика состояния воздушной среды инкубационной камеры, как объекта регулирования может в первом приближении рассматриваться как процесс последовательного преобразования изменений температуры и влажности воздуха в зоне обдува в изменения параметров в зоне размещения яиц (рис. 3.1), считая при этом, что значения параметров в одной точке зоны достаточно характеризуют состояние в ней всего воздуха.
Исходя из этого, динамические свойства температурно-влажностного состояния воздушной среды инкубационной камеры, отражающие зависимость управляемых параметров от факторов, обуславливающих их изменения, в общем виде могут быть определены уравнениями теплового баланса и материального баланса влаги:
![]()
 , (а)
, (а)
(1)
 ,
(б)
,
(б)
![]() , (в)
, (в)
 ,
(г)
,
(г)
где ![]() ‑ температура
воздуха в зоне обдува , град ˚С;
‑ температура
воздуха в зоне обдува , град ˚С;
![]() ‑ масса влаги в воздухе зоны обдува , кг;
‑ масса влаги в воздухе зоны обдува , кг;
![]() ‑ температура
воздуха в зоне размещения яиц, град ˚С;
‑ температура
воздуха в зоне размещения яиц, град ˚С;
![]() ‑ масса влаги в воздухе зоны размещения яиц, кг;
‑ масса влаги в воздухе зоны размещения яиц, кг;
![]() ‑ i-ый вид
потока тепла, влияющий на изменение состояния воздуха, ккал/с
‑ i-ый вид
потока тепла, влияющий на изменение состояния воздуха, ккал/с
![]() ‑ j-ый вид потока влаги, влияющий на изменение состояния
воздуха, кг/с.
‑ j-ый вид потока влаги, влияющий на изменение состояния
воздуха, кг/с.
С1, С2– приведенные теплоемкости зон
камеры, ккал/град.;
t- время; i =1,2…n; j = 1,2…p и т.д. – номера потоков.
Уравнения теплового баланса (1а, в) с детализацией потоков тепла можно представить в следующем виде:
![]()
![]()
![]()
![]()
где ![]() - поток тепла, формируемый нагревательным устройством, ккал/c;
- поток тепла, формируемый нагревательным устройством, ккал/c;
![]() ‑ потоки теплопотерь
через оболочку камеры, соответственно, в зонах обдува и инкубации, ккал/c;
‑ потоки теплопотерь
через оболочку камеры, соответственно, в зонах обдува и инкубации, ккал/c;
Qя – поток
тепла, идущий на изменение температуры массы инкубируемых яиц и устройств их
размещения в инкубационной камере;
Q1- поток
тепла, вносимый воздухом, поступающим в камеру из внешней среды, ккал/c,
![]() ‑ поток тепла, выносимый из зоны обдува и
вносимый в зону инкубации, ккал/с;
‑ поток тепла, выносимый из зоны обдува и
вносимый в зону инкубации, ккал/с;
Q2 - поток тепла,
выносимый воздухом из камеры, ккал/c,
![]() - поток тепла,
отводимый от воздуха устройством охлаждения, ккал/c,
- поток тепла,
отводимый от воздуха устройством охлаждения, ккал/c,
![]() - поток тепла,
отводимый от воздуха устройством охлаждения, ккал/c,
- поток тепла,
отводимый от воздуха устройством охлаждения, ккал/c,
![]() - поток тепла,
затрачиваемый на испарение влаги, вносимой устройством увлажнения, ккал/c,
- поток тепла,
затрачиваемый на испарение влаги, вносимой устройством увлажнения, ккал/c,
![]() - поток тепла,
зависящий от жизнедеятельности эмбрионов, ккал/c,
- поток тепла,
зависящий от жизнедеятельности эмбрионов, ккал/c,
![]() Уравнения
материального баланса (1б, г) с детализацией потоков влаги можно представить в
следующем виде:
Уравнения
материального баланса (1б, г) с детализацией потоков влаги можно представить в
следующем виде:
![]()
![]() , (а)
, (а)
![]() , (б)
, (б)
где D1, Dзо, D2 – потоки влаги, соответственно, вносимые и выносимые
воздухом, проходящим через соответствующие зоны
камеры, кг/c;
![]() ‑ поток влаги,
поступающий от устройства увлажнения, кг/c;
‑ поток влаги,
поступающий от устройства увлажнения, кг/c;
![]() ‑ поток влаги, выделяемой в процессе
жизнедеятельности эмбриона, кг/c;
‑ поток влаги, выделяемой в процессе
жизнедеятельности эмбриона, кг/c;
Поскольку потоки тепла
через оболочку камеры по сравнению с другими потоками тепла весьма малы, то они
не оказывает существенного влияния на переходные процессы изменения температуры
воздуха в камере. Поэтому при построении модели состояния ее воздушной среды
как объекта системы управления ими можно пренебречь. С учетом этого и того, что
![]() , уравнения (2) и (3),могут быть записаны в отклонениях
следующим образом:
, уравнения (2) и (3),могут быть записаны в отклонениях
следующим образом:
![]()
![]() (4)
(4)
![]() …….(4 продолжение)
…….(4 продолжение)
![]()
В условиях нормального функционирования камеры имеют место малые отклонения от заданного уровня значений температуры и влажности воздуха в зоне размещения яиц, поэтому ограничимся моделью объекта в первом приближении, определив линейную интерпретацию уравнений (4).
Изменения температуры воздуха практически не влияют на
температуру теплообменной поверхности нагревательного устройства и можно
считать, что поток тепла ![]() зависит
только от управляющего воздействия U1 и
пропорционален ему, а именно
зависит
только от управляющего воздействия U1 и
пропорционален ему, а именно
Δ![]() = b1 DU1,
(5)
= b1 DU1,
(5)
где b1 –коэффициент
пропорциональности.
Вносимый в камеру с воздухом из внешней среды и выносимый с воздухом из зоны обдува потоки тепла пропорциональны теплосодержанию воздуха этих потоков, а именно
![]() ,
, ![]() ,
(6)
,
(6)
где ![]() ,
, ![]() – теплосодержание
(энтальпия) воздуха, соответственно, вносимого в зону обдува и удаляемого из
нее, ккал/кг;
– теплосодержание
(энтальпия) воздуха, соответственно, вносимого в зону обдува и удаляемого из
нее, ккал/кг;
![]() – темп
прохождения (расход) воздуха через камеру, кг/с
– темп
прохождения (расход) воздуха через камеру, кг/с
В общем виде теплосодержание влажного
воздуха является нелинейной, но гладкой функцией его температуры и
влагосодержания [35], а именно ![]() . Исходя из этого можно записать
. Исходя из этого можно записать
![]() ,
, ![]() (7)
(7)
Определяя эти функции в линейном приближении разложением их в ряд Тейлора относительно установившихся значений переменных и ограничиваясь при этом первым членом разложения, получим
![]()
![]()
или в отклонениях от установившегося режима
(8)![]()
![]()
![]()
где  , [ккал/град×с];
, [ккал/град×с];  , [ккал/кг×с];
, [ккал/кг×с];
 , [ккал/град×с];
, [ккал/град×с];  , [ккал/кг×с];
, [ккал/кг×с];
![]() и
и ![]() - значения потоков
тепла в установившемся режиме.
- значения потоков
тепла в установившемся режиме.
Тепло, которое отводится от воздуха зоны обдува устройством охлаждения, идет на нагрев воды, пропускаемой через охладитель. Поток отводимого тепла, пропорционален разности температур воздуха камеры и среднего значения температуры воды в охладителе
 ,
,
где ![]() , соответственно, температура воды на входе и выходе
охладителя.
, соответственно, температура воды на входе и выходе
охладителя.
С учетом этого количество тепла, передаваемого воздухом камеры охлаждающему устройству, будет
![]() ,
(9)
,
(9)
где ![]() ‑ площадь теплообменной поверхности охладителя, м2
‑ площадь теплообменной поверхности охладителя, м2
![]() ‑
коэффициент теплопередачи, ккал/градּм2ּс
‑
коэффициент теплопередачи, ккал/градּм2ּс
Параметры циркуляции воздуха в зоне обдува можно
считать постоянными, и следовательно,![]() , а поток
, а поток ![]() ‑ только функцией от
‑ только функцией от ![]() и
и ![]() , то есть
, то есть
![]() (10)
(10)
Переходя к отклонениям, это соотношение можно записать
в виде
![]() ,
(11)
,
(11)
где  , ккал/град×с;
, ккал/град×с;  , ккал/град×с
, ккал/град×с
С учетом (5), (8) и
(11) уравнение (4.1)примет вид
![]() (12)
(12)
Изменения температуры
воды ![]() в охладителе
определяются уравнением теплового баланса
в охладителе
определяются уравнением теплового баланса
 , (13)
, (13)
где ![]() ‑ приведенная теплоемкость охладительной системы, ккал/кгּград,
‑ приведенная теплоемкость охладительной системы, ккал/кгּград,
![]() ‑ поток
подводимого к охладителю тепла,
‑ поток
подводимого к охладителю тепла,
![]() ‑ поток отводимого от охладителя тепла.
‑ поток отводимого от охладителя тепла.
Изменение потока тепла, отводимого от охладителя, будет
![]() ,
(14)
,
(14)
где ![]() ‑ расход воды
через охладитель, кг/с,
‑ расход воды
через охладитель, кг/с,
![]() ‑ удельная теплоемкость воды, ккал/кгּград,
‑ удельная теплоемкость воды, ккал/кгּград,
![]() - изменение температуры воды в охладителе. Оно может
рассматриваться как функция двух переменных
- изменение температуры воды в охладителе. Оно может
рассматриваться как функция двух переменных ![]() и
и ![]() . С учетом этого (14) в отклонениях запишется
. С учетом этого (14) в отклонениях запишется
![]()
![]() (15)
(15)
где a42 [ккал/кг], a41,a43 [ккал/град×с] –
соответствующие частные производные функции в установившемся режиме.
Изменения
расхода ![]() однозначно зависят от
управляющего воздействия U2, которое
формируется управляющей системой в виде открытия или закрытия клапана
охлаждающей воды, и можно считать
однозначно зависят от
управляющего воздействия U2, которое
формируется управляющей системой в виде открытия или закрытия клапана
охлаждающей воды, и можно считать
![]() (16)
(16)
где b2 –
коэффициент пропорциональности.
Учитывая (11), (15), а также того, что поток поступающего в охладитель тепла является потоком отводимого им тепла от воздуха, то есть DQпод (t) = DQохл (t), уравнение теплового баланса для охладителя примет вид
 (17)
(17)
Вносимый в зону размещения яиц с воздухом из зоны обдува и выносимый с воздухом из инкубационной камеры потоки тепла пропорциональны теплосодержанию воздуха этих потоков. Определяя их в линейном приближении, по аналогии с (8) будем иметь
(18)![]()
![]()
![]()
где  , [ккал/град×с];
, [ккал/град×с];  , [ккал/кг×с];
, [ккал/кг×с];
Iк –
теплосодержание (энтальпия) воздуха, удаляемого из инкубационной камеры.
Считая, что температура скорлупы яиц и средств их размещения одинаковые, для потока тепла, идущего на нагрев массы инкубируемых яиц и средств их размещения можно записать:
Qя (t) = aя Fя (qк (t) – qя (t)),
где qя – средняя по множеству температура скорлупы яиц, град;
aя – приведенный по массе яиц и средств их размещения коэффициент теплопередачи, ккал/градּм2ּс
Fя – общая поверхность яиц и средств их размещения, м2
По сравнению с переходными процессами изменений температуры воздуха камеры изменения коэффициента aя происходят значительно медленнее, поэтому в первом приближении его можно считать постоянным и рассматривать поток тепла Qя (t) как функцию только температуры скорлупы яиц qя (t) и температуры воздуха камеры qк (t), то есть Qя(t) = Qя(qя , qк).
Определяя эту функцию в линейном приближении и используя разложение ее в ряд Тейлора, будем иметь
DQя (t)= a61 Dqк – a62D qя ,
(19)
где  ,
,  ‑ значения частных производных функции в установившемся
режиме, ккал/град×с
‑ значения частных производных функции в установившемся
режиме, ккал/град×с
Изменения потока тепла, затрачиваемого воздухом зоны размещения яиц на испарение влаги, вносимой в него устройством увлажнения, пропорциональны изменениям потока испаряющейся влаги, а именно
![]() ,
(20)
,
(20)
r – удельная теплота испарения (парообразования), ккал/кг.
Поток влаги, вносимой увлажнителем, определяется
управляющим воздействием U3
![]() ,
(21)
,
(21)
и его можно считать
пропорциональным управляющему воздействию. С учетом этого
![]() ,
(22)
,
(22)
где b3 –коэффициент
пропорциональности.
Изменения
теплового потока ![]() происходят под влиянием жизнедеятельности эмбрионов
инкубируемых яиц. Теплообменные и другие процессы подчиняются биологическим
закономерностям. В течение цикла инкубирования происходят изменения потребления
или генерирования тепла яйцами, выделения или потребления влаги, изменения
газообменных процессов и др., совершенствуются механизмы саморегуляции тепло- и
массообменных процессов эмбриона с внешней средой. Все эти процессы являются
функцией этапа развития эмбрионов, то есть времени инкубирования.
происходят под влиянием жизнедеятельности эмбрионов
инкубируемых яиц. Теплообменные и другие процессы подчиняются биологическим
закономерностям. В течение цикла инкубирования происходят изменения потребления
или генерирования тепла яйцами, выделения или потребления влаги, изменения
газообменных процессов и др., совершенствуются механизмы саморегуляции тепло- и
массообменных процессов эмбриона с внешней средой. Все эти процессы являются
функцией этапа развития эмбрионов, то есть времени инкубирования.
Изменения
теплового потока Δ![]() формируются под влиянием явных тепловыделений яйцами
формируются под влиянием явных тепловыделений яйцами
![]() и потока скрытого
тепла, расходуемого на испарение выделяемой ими влаги и пропорционального её
количеству.
и потока скрытого
тепла, расходуемого на испарение выделяемой ими влаги и пропорционального её
количеству.
Следовательно,
![]() (23)
(23)
где r – теплота парообразования, ΔWя ‑ изменения выделений
влаги сообществом развивающихся в камере эмбрионов.
С учетом (18)-(20), (23), (24)
уравнение (4.3) примет вид
![]()
![]() (24)
(24)
Яйца и средства размещения
аккумулируют подводимое к ним тепло и согласно ранее сделанными допущениями
скорость изменения их температуры можно считать пропорциональной величине
аккумулируемого потока тепла, а именно
![]() ,
,
где Ся – приведенная
теплоемкость массы яиц и средств их размещения, ккал/град
С учетом (19) это соотношение можно
записать
![]() (25)
(25)
Считая влажный воздух смесью сухого воздуха и водяного пара, потоки влаги, вносимой и выносимой воздухом, проходящим через зоны камеры, и количество влаги в воздухе зон камеры определятся соотношениями
![]()
![]()
![]() mзо =Gзо ×dзо , mк =Gк ×dк ,
mзо =Gзо ×dзо , mк =Gк ×dк ,
где ![]() и
и ![]() , соответственно, влагосодержание воздуха, выходящего из
камеры и поступающего в камеру из помещения инкубатория;
, соответственно, влагосодержание воздуха, выходящего из
камеры и поступающего в камеру из помещения инкубатория; ![]() ‑ влагосодержание воздуха, поступающего в зону
размещения яиц; Gзо , Gк. – масса сухого воздуха,
соответственно, в зоне обдува и размещения яиц, кг.
‑ влагосодержание воздуха, поступающего в зону
размещения яиц; Gзо , Gк. – масса сухого воздуха,
соответственно, в зоне обдува и размещения яиц, кг.
Учитывая изложенное и то, что количество влаги вносимой увлажнителем можно считать пропорциональным управляющему воздействию U3 , уравнение (4.2) запишется в виде:
![]()
![]()
![]()
![]()
где b3 –
коэффициент пропорциональности.
Таким
образом, с учетом (12), (17), (24), (25) и (26), (27) система уравнений (4)
приводится к виду
![]()
![]() ,
,
![]()
![]()
![]() ,
,
,
![]() ,
,
![]() ,
,
![]() .
.
Влагосодержание
воздуха d с его
относительной влажностью связывает зависимость [34]
 ,
,
где ![]() ‑ давление
насыщенного пара,
‑ давление
насыщенного пара, ![]() ‑ давление
над уровнем моря.
‑ давление
над уровнем моря.
Давление
насыщенного пара является функцией температуры воздуха ![]() , то есть
, то есть ![]() .В целом, относительная влажность является нелинейной,
но гладкой функцией двух переменных: влагосодержания и температуры, то есть
φ = φ(d, θ).
.В целом, относительная влажность является нелинейной,
но гладкой функцией двух переменных: влагосодержания и температуры, то есть
φ = φ(d, θ).
Применительно
к рассматриваемым процессам это означает
![]() ,
,
![]() ,
,
![]()
Определяя
эти функции в линейном приближении, получим для отклонений
![]() ,
,
![]() ,
,
![]()
или
![]()
![]()
(28)
![]()
![]() ,
,
где
 ;
;  , град-1;
, град-1;  ;
;  , град-1;
, град-1;
.  ;
;  , град-1
, град-1
![]() С учетом
соотношений (28) уравнения (27) примут вид
С учетом
соотношений (28) уравнения (27) примут вид

![]()
![]()
![]() ,
,
 ,
,
![]() ,
,
![]()
![]() где T1=
где T1=![]() , T2 =
, T2 =![]() , T3 =
, T3 =![]() , T4 =
, T4 =![]() ,
, ![]() ,
, ![]() ‑ постоянные времени, с.
‑ постоянные времени, с.
 и
и 
![]() , [град× с× ккал-1];
, [град× с× ккал-1]; ![]() и
и ![]() ,
[град]
,
[град]
Переходя к относительным изменениям переменных, модель температурно-влажностного
состояния воздушной среды, отражающая в линейном приближении зависимость
управляемых параметров от факторов, обуславливающих их изменения, будет
описываться системой уравнений: .
![]() ,
,
![]() ,
,
![]() .
.
![]() ,
,![]()
 ,
,
 ,
,
где x1, x2 –
относительные изменения температуры и влажности
воздуха в камере;
z1 , z3 , z4 ‑ относительные изменения значений
температуры воздуха в зоне обдува, воды в охладителе, скорлупы яиц, устройств
их размещения в камере;
z2 –
относительные изменения влажности
воздуха в в зоне обдува;
f1 , f2 , f3 , ![]() –возмущающие
воздействия, отражающие относительные изменения, соответственно, температуры и
влажности воздуха внешней среды, температуры воды на входе в охладитель,
тепловыделений и влаговыделений яиц;
–возмущающие
воздействия, отражающие относительные изменения, соответственно, температуры и
влажности воздуха внешней среды, температуры воды на входе в охладитель,
тепловыделений и влаговыделений яиц;
ki,j –
постоянные коэффициенты.
В операторной форме эта система уравнений будет иметь вид
![]() ,
,
![]()
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
Здесь ![]() ;
;
 и т.д. – изображения
соответствующих переменных; s – оператор
Лапласа.
и т.д. – изображения
соответствующих переменных; s – оператор
Лапласа.
Соответствующая
(33) структурная схема модели состояния воздушной среды инкубационной камеры приведена на рис.2.
Как видно из схемы, модель температурно-влажностного
состояния инкубационной камеры имеет вид динамической системы с тремя входными
воздействиями, преобразуемыми в выходные параметры апериодическими звеньями,
имеющими между собой перекрестные связи.
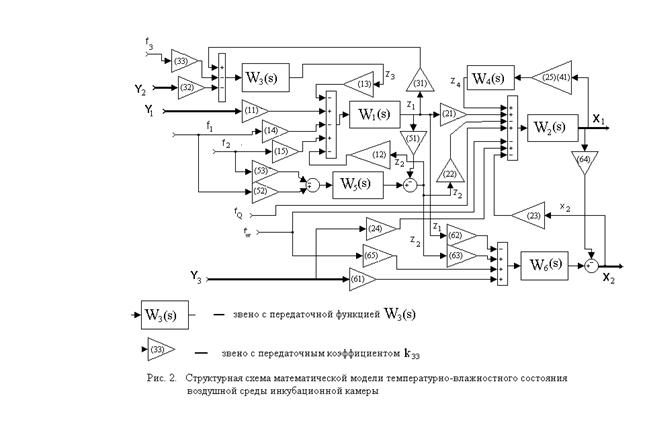
Полученное математическое описание представляет в линейном приближении структурную идентификацию динамики состояния воздушной среды инкубационной камеры, отражая качественно в общем виде происходящие в ней процессы.
Аналитически
определить численные значения коэффициентов построенной модели крайне сложно, в
том числе и потому, что их значения зависят не только от физических
характеристик инкубационной камеры, но и
от биологических процессов развития эмбрионов. В соответствие с этим
количественные характеристики модели должны быть различны для каждого дня
инкубации. Поэтому для получения
численной модели инкубационной камеры необходимы экспериментальные
исследования. Полученная общая математическая модель позволяет определить стратегию
экспериментального нахождения параметров математических моделей, отражающих
количественные характеристики динамик состояния воздушной среды по конкретному
контролируемому внешнему воздействию относительно выходных параметров.
С
теплотехнической точки зрения в инкубационном процессе можно выделить два
состояния: «состояние 1», когда эмбрионы активно потребляют тепло, и «состояние
2», когда происходят возрастающие выделения эмбрионами тепла и влаги.
Согласно
выполненным специалистами по биологии инкубирования яиц птицы иследованиям
воздействия процессов жизнедеятельности эмбрионов на воздушную среду
инкубационной камеры имеет вид, показанный на рис. 3.3
Модель инкубационной камеры для «состояние 1» будет частным
случаем полученной общего вида модели (33) при Y2 =0, Ф3 =0, ![]() , для «состояние 2» ‑
частным случаем (33) при Y1 =0 и Z4 = Z5 =0, поскольку яйца выступают здесь в роли источника
возмущений, а не аккумуляторов подводимого из вне тепла, а средняя температура
средств размещения практически совпадает со средней температурой скорлупы.
, для «состояние 2» ‑
частным случаем (33) при Y1 =0 и Z4 = Z5 =0, поскольку яйца выступают здесь в роли источника
возмущений, а не аккумуляторов подводимого из вне тепла, а средняя температура
средств размещения практически совпадает со средней температурой скорлупы.
Исходя
из структурной схемы общей модели (рис.3.2), для каждого из этих состояний
передаточные функции по управляющим воздействиям приводятся к виду

![]() 1.
1. ![]()
2. ![]()
Как следует из структурной
схемы, наличие полюса и более высокий порядок полинома знаменателя в выражении
передаточной функции (34.1) обусловлен апериодическим звеном в цепи
положительной обратной связи.
Инкубационная камера относится категории объектов с самовыравниванием и при оказании на нее внешнего воздействия, например в виде скачка, ее температура и влажность со временем стремятся к некоторому постоянному значению. Из этого следует, что все коэффициенты знаменателя передаточных функций (34) определенно положительные, а для (34.1) это возможно только при условии
k25 k41 < 1. (34)
Реальные процессы изменения температуры при скачкообразном изменении управляющих воздействий носят монотонный апериодический характер и можно исходить из того, что переходные процессы описываются функциями, представляющими решение линейных дифференциальных уравнений, то есть аппроксимировать передаточную функцию (34.1) передаточной функцией в каскадной форме:
Рис.3 Воздействия процесса жизнедеятельности эмбрионов
яиц птицы на среду инкубирования (данные нормированы на 1000 шт. яиц)
 (35)
(35)
С целью проверки
принципиальной допустимости такого вывода было проведено моделирование системы
описываемой передаточной функцией вида (33.1) средствами Matlab/Simulink
(рис. 3.4).
Передаточной функции
(33.1) соответствует динамическая система в виде цепи из последовательно
включенных апериодических звеньев первого порядка, одно из которых охвачено
положительной обратной связью с апериодическим звеном первого порядка, при этом
произведение их передаточных коэффициентов меньше единицы (условие(35)).
Как видно из рис.
3.4б,в охват апериодического звена положительной обратной связью с
апериодическим звеном первого порядка ведет к росту общего передаточного
коэффициента и увеличению длительности переходного процесса.
На рис.3.5
осциллограммы переходных процессов модельных вариантов систем на ступенчатое
изменение входного сигнала представлены для большей наглядности совместно.
На рис. 3.6 приведен
пример такой аппроксимации. Здесь расхождения между значениями функций
переходных процессов в любой момент времени не превышает 3%.
При оказании на
инкубационную камеру управляющих воздействий в виде периодического включения и
выключения нагревательных устройств изменение температуры воздуха имеет вид
гладких кривых. На рис 3.7а приведен фрагмент экранной формы центрального
компьютера системы управления инкубаторием отражающей такой процесс изменения
температуры. Гладкий вид кривых изменения температуры означает, что степень
полинома знаменателя передаточной функции инкубационной
Рис. 3.4. Варианты моделей и осциллограммы
переходных процессов на ступенчатое входное воздействие.
камеры по управляющему воздействию
относительно температуры не может быть меньше двух.
На рис.3.7б,в
приведены осциллограммы переходных процессов модельных систем при входном
воздействии в виде последовательности прямоугольных импульсов. По виду они аналогичны процессам
регистрируемым опытным путем (рис.6 а).
Имитационное
моделирование показывает, что принципиально возможна аппроксимация системы с
передаточной функцией (33.1) каскадной системой из двух апериодических звеньев
первого порядка, постоянные времени и передаточный коэффициент которой должны
быть бόльшими, чем это имеет место в прямой цепи исходной системы.
Таким образом, при экспериментальном определении передаточной функции камеры как объекта управления по температуре целесообразно исходить из того, что переходные процессы описываются функциями, представляющими решение линейных дифференциальных уравнений, то есть идентифицировать динамические свойства передаточной функцией вида (35) при n > 2
Поскольку
биологическая составляющая функционирования инкубационной камеры меняется во
времени, то ее параметров как объекта управления будут различны для каждого из
дней инкубации. Поэтому при разработке средств обеспечения режимов инкубации
следует ориентироваться на параметры состояния воздушной среды камеры в те дни,
когда осуществлять управление наиболее сложно и допустимые отклонения
регулируемых параметров от заданных значений минимальны.
Развивающиеся в инкубационной камере эмбрионы наиболее чувствительны к изменениям параметров воздушной среды в начале цикла инкубации, которые ранее были определены как «состояние 1», поскольку в
Рис. 3.7. Осциллограммы переходных процессов при входном воздействии в виде прямоугольных импульсов.
а – опытные
данные, б – схема модели, результаты
моделирования.
этот период еще не сформировались
защитные механизмы их гемеостазиса. Из двух выходных переменных значения
температуры воздуха в камере наиболее чувствительны к возмущающим воздействиям.
Исходя из этих обстоятельств, наиболее сложным, является регулирование
температуры воздушной среды в начальный период инкубации и экспериментально
именно по этому каналу управления следует определять передаточную функцию и
исходить из нее при определении энергосберегающего алгоритма формирования
температурно-влажностного состояния воздушной среды инкубационной камеры.
Экспериментальное
определение параметров
математической модели инкубационной камеры.
Согласно
полученной математической модели инкубационной камеры изменения температуры q(t) воздуха в ней при начальном условии ![]() =const и
скачкообразном изменении управляющего воздействия
=const и
скачкообразном изменении управляющего воздействия
![]()
 (1)
(1)
может быть
аппроксимировано уравнением переходного процесса
 , (2)
, (2)
или в
отклонениях от начального значения
 , (3)
, (3)
которое является решением линейного дифференциального уравнения второго порядка вида

Изменение температуры воздуха при скачкообразном изменении управляющего воздействия может быть получено опытным путем. В этом случае, значения постоянных времени и передаточного коэффициента Коб могут быть определены сопоставлением полученного «экспериментального решения» уравнения (2), называемого часто «разгонной кривой», с его аналитическим решением (3).
Применительно
к ИК экспериментальное получение кривых переходных процессов сталкивается с ограничениями
конструктивного характера и необходимости сохранения ее биологического статуса:
o возможный
диапазон изменения температуры воздуха в камере имеет естественное ограничение
«снизу» ‑ температура воздуха в помещении инкубатория. Длительность
нахождения на этом уровне технологически безопасна в течение нескольких минут.
o «верхнее»
значение температуры не может быть даже кратковременно свыше 39 градусов;
o управляющее воздействие по нагреву может иметь
только вид единичного прямоугольного импульса, продолжительность которого
ограничена временем достижения температуры некоторого допустимого уровня.
Технологически безопасным можно считать кратковременное нахождение температуры
воздуха ИК на уровне 38,5 С°. Если при снятии кривой переходного процесса не ограничить
время действия управляющего воздействия, то температура воздуха может на много
превысить допустимый уровень.
o уровень
температуры в ИК, при котором скорость ее изменения на момент нанесения
управляющего воздействия можно практически считать равной нулю, может быть
достигнута выключением системы жизнеобеспечения и полным открытием дверей. Этот
уровень равен значению температуры помещения инкубатория.
Перечисленное
определяет особенности проведения экспериментов и выбора методов обработки
данных, получаемых в их результате. В частности, применительно к ИК невозможно
экспериментальное получение «разгонных кривых» в классическом виде. Для
определения численных значений параметров передаточных функций ИК как объекта
регулирования возможно получение лишь участков разгонных кривых в диапазоне ![]() 39С°,. где
39С°,. где ![]() - начальное значение температуры в момент оказания
управляющего воздействия, равное значению температуры в помещении инкубатория.
- начальное значение температуры в момент оказания
управляющего воздействия, равное значению температуры в помещении инкубатория.
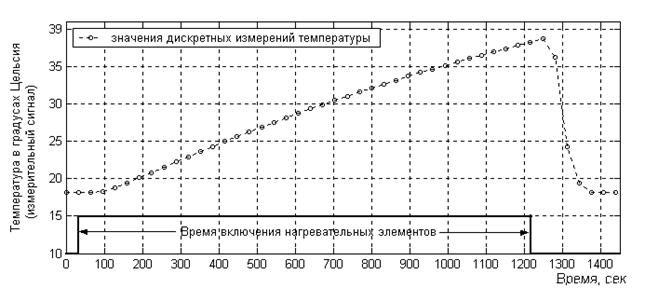 Рис.
4.1 Переходный процесс изменения температуры
Рис.
4.1 Переходный процесс изменения температуры
в инкубационной камере
Для получения параметров уравнения (3) по экспериментальным кривым переходных процессов изменения температуры в ИК целесообразно использовать предложенный академиком А.Н. Крыловым [Крылов А. Н. Лекции о приближенных вычислениях. Изд. шестое, Гос. издательство технико-теоретической литературы. М.1954г., 398с.] метод аппроксимации экспериментальных кривых рядом экспоненциальных членов. Его суть заключается в следующем.
Если ищется аналитическое приближение в виде экспериментальной кривой в форме
![]() ,
,
то взяв на экспериментальной кривой равноотстоящие на величину h значения y и положив
![]() ,
,
![]()
и
используя экспериментальные значения ![]() ,
, ![]() ,… можно составить систему уравнений
,… можно составить систему уравнений
![]()
![]()
![]()
![]()
……………………………………
Числа zi принимаются корнями уравнения вида
![]() (4)
(4)
Взяв n+1 следующих друг за другом значений yi , можно после определенных преобразований получить n уравнений вида
![]()
![]()
и т.д. ,
из
которых при известных по экспериментальной кривой значениям yi определить значения
![]() , а далее
, а далее ![]() как корни
уравнения (4).
как корни
уравнения (4).
На рис.4.2 приведены данные дискретных измерений температуры воздуха в инкубационной камере, полученные при включении нагревательных элементов после выравнивания температуры в камере с температурой в инкубатории. Шаг дискретизации 32 с
Если взять экспериментально
полученные значения ![]() через равноотстоящие
интервалы Δt, то
их значения в отклонениях от начального значения в соответствии с (3) будут
через равноотстоящие
интервалы Δt, то
их значения в отклонениях от начального значения в соответствии с (3) будут
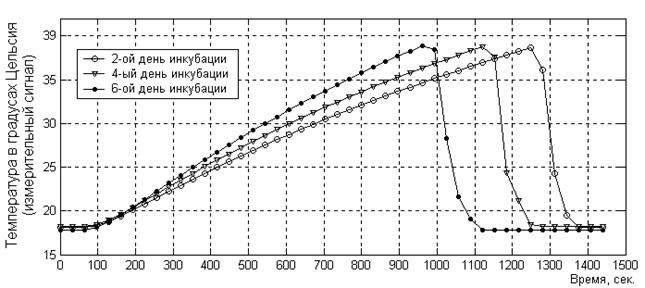 Рис.4.2
Экспериментальные кривые переходных процессов изменения температуры
инкубационной камеры
Рис.4.2
Экспериментальные кривые переходных процессов изменения температуры
инкубационной камеры ![]() как отклики на
управляющее воздействие в различные дни инкубации.
как отклики на
управляющее воздействие в различные дни инкубации.
![]()
![]()
![]()
![]()
![]()
![]()
и т. д.
Обозначим A1=Kоб; ![]() ;
; ![]() ;
;
и
![]() ;
; ![]() ;
; ![]() , (7)
, (7)
Положив,
что величины ![]() ;
; ![]() ;
; ![]() суть корни
уравнения
суть корни
уравнения
![]() +
+![]() B1
+
B1
+![]() B2+B3=0
(8)
B2+B3=0
(8)
с учетом (6) соотношения (5) можно записать в виде:
![]() =A1+
=A1+![]() A2 +
A2 +
![]() A3 ;
A3 ;
![]() =A1+
=A1+![]() A2 +
A2 +![]() A3 ;
A3 ;
![]() =A1+
=A1+![]() A2 +
A2 +![]() A3 ;
A3 ;
![]() =A1+
=A1+![]() A2 +
A2 +![]() A3 ;
A3 ;
![]() =A1+
=A1+![]() A2
+
A2
+![]() A3;
A3;
![]() =A1+
=A1+![]() A2 +
A2 +![]() A3
A3
и
т.д.
Умножив первую строку на В3 , вторую – на В2 , третью – на В1 , четвертую на 1 и сложив их, получим
Dq1В3 + Dq2В2 + Dq3В1+ q4 =
A1(B3+B2+B1+1)+![]() A2(B3+
A2(B3+![]() B2 +
B2 +![]() B1+
B1+![]() )+
)+![]() A3(B3+
A3(B3+![]() B2+
B2+![]() B1+
B1+![]() ) (10)
) (10)
Так как по предположению ![]() =1;
=1; ![]() и
и ![]() корни уравнения (7) ,
то правые части этого уравнения в сумме будут равны нулю. Поэтому будем иметь
корни уравнения (7) ,
то правые части этого уравнения в сумме будут равны нулю. Поэтому будем иметь
Dq1В3+ Dq2В2+ Dq3В1+ Dq4=0 (11)
Проделав ту же процедуру со следующими четырьмя строками, получим
Dq2В3+Dq3В2+Dq4В1+Dq5=0 (12)
Следующие четыре строки дадут
Dq3В3+Dq4В2+Dq5В1+Dq6 =0 (13)
В этих трех уравнениях неизвестными являются величины В1, В2, В3, а остальные величины: Dq1, Dq2, Dq3, Dq4, Dq5, Dq6 , могут быть получены экспериментально в результате измерений переходного процесса. При наличии значений Dq1, Dq2, Dq3, Dq4, Dq5, Dq6 неизвестные В1, В2, В3 определяются совместным рассмотрением уравнений (9)‑(10), а затем, по ним вычислить корни кубического уравнения
z2 =![]() ; z3 =
; z3 =![]() ,
(14)
,
(14)
имея ввиду, что z1 =1 по определению (6).
Значения постоянных времени находятся из соотношений
![]() и
и ![]() (15)
(15)
Значение передаточного коэффициента объекта Kоб может быть определено из любого уравнения системы (8) после подстановки численных значений Dq, Т1 и Т2 , а именно
 , (16)
, (16)
где ![]() ‑ значение температуры в момент времени (
‑ значение температуры в момент времени (![]() ) после включения нагревательных элементов.
) после включения нагревательных элементов.
Экспериментальное определение значений температуры воздуха ИК в переходном режиме как отклика на скачкообразное изменение управляющего воздействия ограниченной длительности проводилось дискретно во времени с шагом дискретизации 32 секунды. Регистрация откликов проводилась с трехкратной повторностью с интервалами между опытами 2,5 часа на 2-ой, 4-ый и 6-й дни инкубации. Переходные процессы на 2-ой день инкубации проводились независимо в двух инкубационных камерах инкубатория. Регистрация данных измерений осуществлялась автоматически в памяти компьютера, в который сигнал поступал с измерительного канала контроллера системы управления температурным режимом инкубационной камеры.
При обработке экспериментальных данных, полученных во 2-й и 4-ый дни инкубации, брались значения температуры с момента оказания управляющего воздействия и в моменты времени, равноотстоящие друг от друга на 160 с. Время чистого запаздывания принято 16 с
В таблице 4.1 приведены средние значения данных регистрации температуры в каждой из серии опытов
Полученные значения величин В1, В2, В3 для каждой из серий опытов приведены в таблице 4.2. Здесь же приведены вычисленные значения z2 и z3, вычисленные в соответствии с (15) и значения постоянных времени Т1 и Т2 , вычисленные в соответствии с (16)
На рис.4.3 приведены начальные участки теоретических «разгонных» кривых с параметрами, приведенными в таблице 4.2. Маркерами обозначены средние значения, полученные экспериментально при регистрации соответствующих переходных процессов.
Таблица 4.2
|
Дни инкубации |
В1 |
В2 |
В3 |
z2 |
z3 |
Т1 |
Т2 |
Коб |
|
||||||||
|
2 |
-1.95 |
0.99 |
-0.04 |
0.04 |
0.91 |
49.7 |
1696.5 |
42.1 |
|||||||||
|
4 |
-1.95 |
0.995 |
-0.045 |
0.05 |
0.9 |
53.41 |
1518.6 |
42.5 |
|||||||||
|
6 |
-1939 |
0.976 |
-0.0368 |
0.041 |
0.898 |
50.1 |
1495.2 |
48.8 |
|||||||||
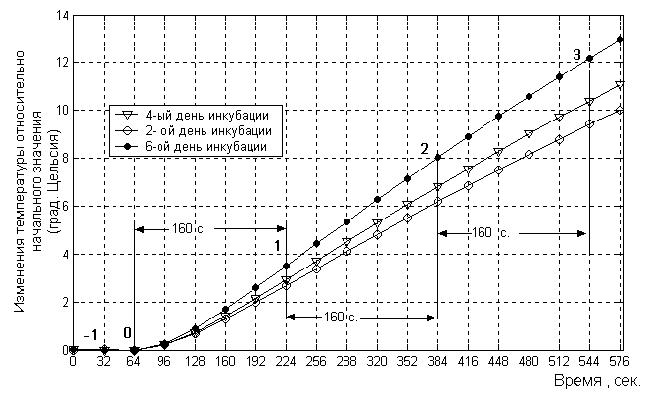
Рис. 4.3. Начальные участки разгонных кривых
Глава 5. Определение алгоритма локального управления
температурно-влажностным режимом.
В инкубаторах предыдущего поколения стабилизации температурно-влажностных параметров воздуха обеспечивалась двухпозиционными регуляторами непрерывного действия. По технико-экономическим причинам во вновь разрабатываемых камерах было решено использовать устройства нагрева, охлаждения и увлажнения двухпозиционного действия, как наиболее надежные и дешевые.
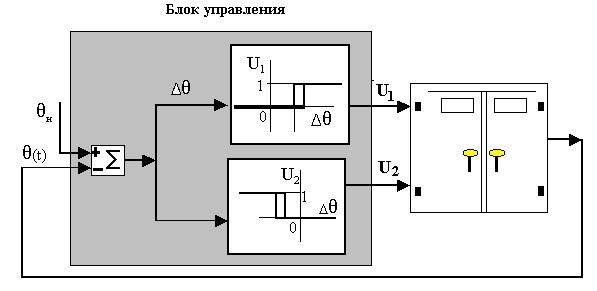 Инкубатор
имеет два канала оказания управляющих воздействий при регулировании
температуры: один канал – воздействие на нагревательные элементы, второй канал
– воздействие на устройство охлаждения. Функциональная схема традиционной
системы управления имеет вид, представленный на рис.5.1,а.
Инкубатор
имеет два канала оказания управляющих воздействий при регулировании
температуры: один канал – воздействие на нагревательные элементы, второй канал
– воздействие на устройство охлаждения. Функциональная схема традиционной
системы управления имеет вид, представленный на рис.5.1,а.
Рис 5.1,а
Специфика процесса инкубирования такова, что до седьмого дня поддержания биологически обоснованной температуры осуществляется за счет подогрева, то есть включения только нагревательных устройств, после седьмого дня требуется отвод тепла, то есть управление только по каналу U2 . На седьмой день, чтобы не было «соревнования» каналов, операторы варьируют ставкой температуры в пределах ±0,5°С. Таким образом для анализа динамики процесса регулирования температуры блок управления можно рассматривать как одноканальный в виде, показанном на рис. 5.1,б.
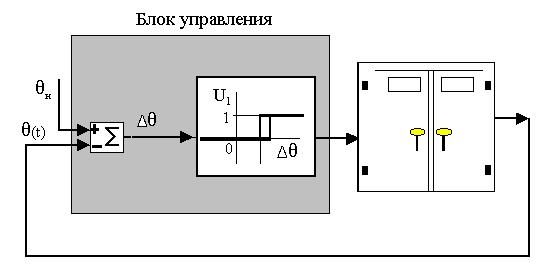
Рис.5.1,б
Для выяснения возможности использования на новых объектах ранее применявшихся регуляторов были проведены средствами компьютерного эксперимента и прямым экспериментом исследования процесса стабилизации температуры двухпозиционными регуляторами непрерывного действия. В качестве инструмента компьютерного моделирования использовался программный пакет Matlab/Simulink.
На рис 5.2 представлена схема компьютерной модели системы управления температурой воздуха в камере с двухпозиционным регулятором непрерывного действия.
Наилучшие результаты, с точки зрения точности поддержания заданного значения температуры, были получены на модели со следующими параметрами блока управления: порог включения при отклонении температуры от заданного значения 0.1°С, порог выключения при отклонении 0°С, коэффициент коррекции статической ошибки 0,997, величина управляющего воздействия при включенном реле 1, при
Рис.5.2
Рис.5.3
выключенном состоянии 0. На рис 5.3 приведены полученные в процессе моделирования осциллограммы процесса изменения температуры в инкубационной камере. Заданное значение температуры 37,5°С.
Моделирование показало, что при применении релейных двух позиционных регуляторов непрерывного действия получить амплитуду колебаний значений температуры относительно задания в установившемся режиме менее ±0,3С° не представляется возможным.
 В
связи с этим были рассмотрены варианты дискретного двух позиционного
регулирования. Предложено применить широтно-импульсное модулирование
двухпозиционного управляющего сигнала в зависимости от величины отклонения
текущего значения температуры от заданного уровня. Функциональная схема такого
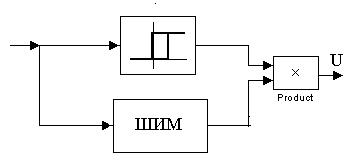
управляющего блока в общем виде приведена на рис.5.4.
В
связи с этим были рассмотрены варианты дискретного двух позиционного
регулирования. Предложено применить широтно-импульсное модулирование
двухпозиционного управляющего сигнала в зависимости от величины отклонения
текущего значения температуры от заданного уровня. Функциональная схема такого
управляющего блока в общем виде приведена на рис.5.4.
Рис. 5.4
Для определения эффективности указанного выше подхода к совершенствованию процесса регулирования температурно-влажностных параметров использовались средства имитационного компьютерного моделирования.
 При
построении модели ШИМ был положен следующий принцип.Пусть имеется генератор
пилообразного сигнала П(t)
вида (рис.5.5) с высотой пила А. и шагом t0.
При
построении модели ШИМ был положен следующий принцип.Пусть имеется генератор
пилообразного сигнала П(t)
вида (рис.5.5) с высотой пила А. и шагом t0.
Если сигнал этого генератора вычесть из постоянного сигнала с уровнем u, то получим пилообразный сигнал, у которого длительность положительного значения каждого импульса t1 будет пропорциональна уровню постоянного сигнала u. Из подобия треугольников (рис.5.5) следует соотношение

Если из этого сигнала сформировать импульсную последовательность Out(t), исходя из условия, что Out=1 в течение времени, когда u больше пилы, иначе Out=0, а именно
Out(t)= max(sign(П(t) – u), 0), (5.1)
то получим последовательность прямоугольных импульсов со скважностью пропорциональной уровню сигнала y
![]() ,
,
Эти условия справедливы и для случая сигнал u(t), являющегося функцией времени, но квантованного с шагом выборки t0. При этом импульсы Out(t) будут синхронизированы по переднему фронту изменений квантованного сигнала.
 Функциональная
схема модели широтно-импульсного модулирования, реализующая изложенный выше
принцип, приведена на рис. 5.6
Функциональная
схема модели широтно-импульсного модулирования, реализующая изложенный выше
принцип, приведена на рис. 5.6
Рис. 5.6
Входной сигнал подвергается
дискретизации экстраполятором нулевого порядка с шагом выборки t0.
Рис. 5.7
Генератор пилообразного сигнала П(t) с периодом равным шагу квантования входного сигнала сформирован с помощью трех типовых генераторов сигналов и сумматоров (рис.5.7а). На этом же рисунке приведены образцы осциллограмм сигналов генерируемых элементами системы и результирующего сигнала П(t) (рис.5.7,б).
Сигнал генератора вычитается из модуля дискретного сигнала и далее формируется в соответствие с (5.1).
Схема имитационного
моделирования ШИМ приведена на ![]() рис.5.8
рис.5.8
На рис. 5.9 представлен виды сигналов на выходе ШИМ
с
зависимостью скважности ![]() от величины сигнала
рассогласования
от величины сигнала
рассогласования ![]()
![]() и
и ![]()
Общая функциональная схема модели системы регулирования температуры с широтно-импульсным модулированием двухпозиционного управляющего воздействия представлена на рис 5.10
На
основании проведенного имитационного моделирования процессов регулирования с
широтно-импульсным модулированием двухпозиционного управляющего воздействия
было предложено основу алгоритм функционирования управляющего блока строить
таким образом, чтобы изменения скважности ШИМ при изменениях сигнала
рассогласования в пределах (–0,2 … 0)С° в соответствие с
соотношением ![]() , а при изменениях в пределах (-0,5 … -0,2) С° в
соответствии с соотношением
, а при изменениях в пределах (-0,5 … -0,2) С° в
соответствии с соотношением ![]() .
.
Рис.5.10
Моделирование показало, что применение широтно-импульсного (ШИМ) регулирования с предложенной кусочно-линейной зависимостью скважности от величины рассогласования при дискретизации измерительного сигнала экстраполятором нулевого порядка позволяет обеспечить диапазон колебания значений температуры в установившемся режиме в требуемом диапазоне – до ±0.1С°.
Результаты моделирования были использованы при разработке алгоритма управления температурно-влажностным режимом в новых инкубаторах.
Алгоритм локального управления температурно-влажностным состоянием воздуха в камере инкубатора приведен на рис.5.11.
На рис.5.12 представлены осциллограммы процесса стабилизации
 температуры,
полученные при моделировании (а) и в инкубационной камере, в процессе ее
нормального функционирования (б), (в) под управлением по предложенному
алгоритму.
температуры,
полученные при моделировании (а) и в инкубационной камере, в процессе ее
нормального функционирования (б), (в) под управлением по предложенному
алгоритму.
Рис.5.12
Разработка системы управления процессами
инкубации в инкубатории.
Создание высокопроизводительных инкубаторов предъявляет повышенные требования к уровню надежности их функционирования. При заложенной в новый инкубатор производительности в случае, если будет допущен срыв вывода только за один цикл инкубации, экономический ущерб составит более миллиона рублей.
Современный
промышленный инкубаторий – это крупномасштабное производство, имеющее в своем
составе в ряде случаев свыше сотни инкубаторов. При традиционных системах
управления с децентрализованным контролем для обслуживания такого количества
камер требуется большой штат оперативного персонала. По существующим правилам
оператор должен осуществлять регулярный контроль работы камер и через каждые
два часа регистрировать в журнале наблюдений данные о температуре и влажности в
каждой камере.
Осуществлять такой контроль в инкубатории современных масштабов, силами оперативного персонала, особенно в ночное время, не только весьма трудоемкая операция, но и наиболее слабое по надежности операция производственного цикла, поскольку результат контроля целиком зависит от добросовестности, объективности и физического состояния операторов. Существенно возрастает вероятность операторских ошибок типа промахов, то есть неправильной реализации верных намерений, и типа заблуждений, то есть правильного выполнения действий на основе неверных предпосылок. В случае возникновения нештатной ситуации оператор, может по организационным причинам затратить значительное время на поиск камеры с нарушенным характером функционирования и вида возникшей неисправности, что, как правило, приводит к снижению выводимости.
Для обеспечения высокой надежности функционирования инкубаторов в инкубатории как производственной системе и снижения влияний «человеческого фактора» в основу аппаратно-программная реализация системы управления технологическими процессами вывода цыплят была положена концепция сетевой двухуровневой организации, состоящая из центрального
компьютера (ЦКС) и
микропроцессорных блоков локального управления (БЛУ), размещаемых на камерах
инкубаторов (рис.6.1). В качестве ЦКС заложено использование персонального
компьютера с операционной системой  Windows.
Windows.
Рис. 6.1
ЦКС
– центральный компьютер сети, БЛУ – блок локального управления.
Исходя из анализа технологического
процесса в камерах инкубатора и в инкубатории в целом, рекомендаций по
инкубации яиц сельскохозяйственной птицы ВНИТИП были определены функции ЦКС,
блоков локального управления и элементов локальной сети.
Центральный компьютер сети (ЦКС)
осуществляет последовательный опрос поставленных оператором на контроль блоков,
передавая по каналу обмена номер каждого блока и принимая в ответ всю
необходимую информацию о ходе технологического процесса.
В ЦКС полученная информация от блоков
обрабатывается на аппаратном и программном уровнях и выводится на терминал, а
аварийные значения параметров выделяются для зрительного восприятия и
записываются во внешнюю память ЦКС для дальнейшей статистической обработки. В
ЦКС предусмотрена возможность отслеживания допусковых значений контролируемых
параметров в течение всего цикла инкубации по нескольким точкам, введенным
оператором с терминала ЦКС. По истечении времени инкубации предусмотрена
возможность вывода на печатающее устройство бланк - паспорта процесса
инкубации по каждой камере.
БЛУ объединяются в сеть с ЦКС одной
телефонной парой проводов и имеют свои идентификационные номера, записанные в
ПЗУ на этапе их изготовления. БЛУ был
разработан в виде микропроцессорного котроллера БМИ-Ф-15 (рис.6.2) со следующими основными функциональными возможностями:
регулирование температуры и влажности воздуха, управление поворотом лотков
через 1 час и установку их в горизонтальное положение, управление освещением
камеры, обеспечение защиты ее токоприемников от короткого замыкания и
блокировки недопустимых действий, сигнализация о возникновении нарушений
режима, измерение и цифровая индикация значений режимных параметров,
формирование и передача на верхний уровень управления требуемой информации и
локализация поступающих с верхнего уровня команд. Осуществление допускового контроля температурно-влажностных параметров и наличия
воздушного потока вентилятора.
С
целью удобства и повышения эффективности обслуживания камер БЛУ каждого инкубатора
имеет развитый человеко-машинный интерфейс (интерфейс пользователя),
обеспечивающий высокий уровень
информационного
обеспечения оперативного персонала о ходе технологического процесса,
возникновении и локализации внештатных ситуаций, а также осуществление на
объекте операторских воздействий по корректировке заданий и устранению
возможных нарушений режима.

Рис.6.2 Внешний вид блок локального управления процессом
инкубации БМИ-Ф-18
Микропроцессор БЛУ построен на
базе однокристальной микро-ЭВМ (микросхема
К1820ВЕ01), которая позволила при минимальной конфигурации блока обеспечить
выполнение необходимых для работы инкубатора функций. Вся информация, поступающая в
микро-ЭВМ, обрабатывается и выводится по алгоритму, приведенному в приложении
3. Программа работы микро-ЭВМ находится в микросхеме КР556РТ18.
Каждый БЛУ работает по программе,
записанной в его собственной памяти - ПЗУ, емкостью 2 К, что составляет примерно
1,0 - 1,5 тыс. команд. ПЗУ блока состоит из двух банков памяти (0-го и 1-го) по
1К в каждом,
переключаемых программно. Программное обеспечение БЛУ написано
на машинно-ориентированном языке " Ассемблер "
Канал связи БЛУ с ЦКС электрически выполнен
в виде двух пар согласованных телефонных проводов, длиной до 2-х км. Обмен
производится по двухпроводной линии в направлении к блоку и по двухпроводной
линии в направлении от блока по стандартному каналу обмена IRPS (1бит ‑
стартовый, 8 информационных и 2 стоповых бита) со скоростью передачи 600 бод.
Количество блоков на линии до 200 шт. Работа локальной сети обеспечивается
программой обслуживания сети, которая хранится в памяти ЦКС.
От ЦКС в сторону блока по линии связи
десять раз передается номер блока (1 байт) с интервалами не чаще, чем 18,4
мсек.
БЛУ, получив от ЦКС номер блока, сравнивает
его с записанным в ПЗУ и при условии совпадения принятого номера с собственным
номером передает ЦКС следующую информацию:
1
байт - собственный номер блока; 2 байт - текущая температура в камере
инкубатора; 3 байт - задание по температуре; 4 байт - текущая влажность в
камере инкубатора; 5 байт - задание по влажности; 6 байт - содержимое _IN порта
(младший полубайт): 0 разряд - вентилятор не исправен =0, вентилятор исправен
=1; 1,2,3 разряды не используются.
Старший
полубайт:
4
разряд - нагрев выключен = 0, нагрев включен = 1
5
разряд - охлаждение выключено = 0, охлаждение включено = 1;
6
разряд - увлажнение выключено = 0, увлажнение включено = 1;
7
разряд - звуковой сигнал выключен = 0, звуковой сигнал включен =
1
7
байт - ВРЕМЯ в минутах с момента возникновения пониженной влажности в камере
инкубатора;
8
байт - младший полубайт: 0,1 время с момента возникновения неисправности
вентилятора ( от 0 до 2 минут);
2 разряд
не используется; 3 разряд признак неисправности вентилятора.;
Старший
полубайт:
4-7
разряды - время оставшееся до выхода камеры на режим (единицы минут );
9
байт 0-7 разряды - время оставшееся до выхода камеры на режим (десятки минут и
часы );
10 байт
- контрольная сумма передаваемой информации;
ЦКС, приняв исходную информацию от блока,
проверяет совпадение контрольных сумм, обрабатывает и представляет на дисплее
текущие характеристики техпроцесса, анализирует наличие отклонений и аварийных
ситуаций, производит контроль корректировки рабочих параметров в течение цикла
инкубации.
Функциональная схема блока управления в
составе локальной сети представлена на Рис. 6.3.
Блок содержит устройства ввода заданий по
температуре 4 и влажности 5, которые через усилители 6 и 7 (микросхемы
К140УД13,К157УД2) связаны с коммутатором аналоговых сигналов (КР590КН6) 8. На
вход этого же коммутатора поступают сигналы от измерительных преобразователей
камеры инкубатора (ИП температуры и влажности). Вход микропроцессора (МП)10
К1113ПВ1А (Б)) 9 соединен с с коммутатором
8. На выходе МП имеется блок усилителей (микросхемы КТ972А и реле РПГ-8),
которые обеспечивают управление устройствами нагрева 12, охлаждения 13,
увлажнения 14 и аварийной сигнализации 15. ШИМ-регулирование достигается путем
включения на необходимое время соответствующих исполнительных органов (с
периодичностью 32 сек и скважностью зависящей от величины отклонения регулируемой величины).
К МП также подключены дискретный ИП потока
воздуха 16, устройство выбора режима 17, дешифратор индикации 20 с блоком
отображения 21, на котором выводятся текущие значения температуры, влажности,
задание этих параметров, а также время выхода камеры на рабочий режим. При
включении системы увлажнения, неисправности вентилятора, низкой или повышенной
температуре через аналого-цифровой преобразователь (АЦП) (микросхема и
пониженной влажности предусмотрена световая сигнализация.
С целью повышения надежности работы система
снабжена дополнительным контуром защиты, включающим контактный датчик
температуры 22, который через релейный усилитель 23 подключен к аварийной
сигнализации 15 и нагревателю
Подключение блока в сеть осуществляется
через оптический блок гальванической развязки 24. Обмен информацией между БЛУ и
ЦКС осуществляется программно стандартным последовательным кодом.
На цифровом индикаторе блока, в зависимости
от запроса оператора выводится
информация о значениях:
температуры в камере инкубатора, °С
задания по температуре, °С
влажности в камере инкубатора, %
задания по влажности, %
время оставшееся до выхода камеры на режим
контроля. (в часах и минутах).
Световая сигнализация и реле включения
звуковой сигнализации блока, включаются при
-
отклонении температуры воздуха
от заданного значения в зоне ИП температуры сопротивления не менее +/-0,5 °С;
- отклонении в течение более 30 минут
относительной влажности воздуха от заданного значения в зоне ИП влажности более
5 %;
- длительности времени установления
заданного температурного режима в зоне ИП температуры более 5 час;
- отсутствии сигнала о наличии воздушного
потока от вентилятора более 2 (+/-0,5) мин;
- наличии сигнала о срабатывании системы
контроля верхнего предела температуры.
-
При регулировании температуры
аналоговый сигнал от ИП температуры 2 поступает на вход усилителя 6, где
усиливается и поступает на коммутатор аналоговых сигналов 8, который по команде
МП 10 коммутирует его на АЦП 9. АЦП преобразовывает сигнал в цифровую
форму и передает в ОМЭВМ. Аналоговый сигнал
от задатчика температуры 4 также поступает через коммутатор 7 к АЦП 9 и в
цифровой форме передается в МП, где по заложенной программе вычисляется
величина рассогласования между полученными сигналами от датчика 2 и задатчика 4
температуры и в зависимости от величины и знака результата выдает соответствии
с алгоритмом, изложенным в гл.5, управляющее
Рис. 6.3
воздействие через блок 10
усилителей-преобразователей на нагреватель 11 или охладитель 13.
При регулировании влажности аналоговый
сигнал от ИП влажности 3 поступает на вход усилителя 7, где усиливается до
определенного значения и поступает на коммутатор 8, который по команде МП 10
передает его в АЦП 9, который преобразует сигнал в цифровую форму и пересылает
в МП. Аналоговый сигнал от задатчика влажности 5 аналогично преобразуется в
цифровую форму и поступает в МП, где по программе вычисляется величина
рассогласования между полученными значениями. В зависимости от результата
выдается соответствии с алгоритмом, изложенным в гл.5, команда через
усилитель-преобразователь 11 на увлажнитель 14.
Сигнал от дискретного ИП потока воздуха 16
имеет два значения: включено/выключено. Он поступает на вход МП, который в
случае отсутствия сигнала выдает сигнал аварии.
Сигнал от устройства выбора режима 17,
поступает на порт входа МП. В зависимости от вида сигнала МП индицирует
информации о текущем и заданном значениях температуры и влажности в камере
инкубатора, времени в часах и минутах, оставшемся до выхода камеры на режим
контроля.
Сигнал "Авария" выдается МП в
случае возникновения любого вида отклонений от нормальной работы как самого
устройства, так и при нарушении технологического процесса.
Кроме того, в случае возникновения
неполадок в системе управления, например, когда повышается температурный режим
выше допустимого, срабатывает независимая система аварийной защиты. В этом
случае сигнал от контактного термометра 22 через релейный усилитель 23
отключает нагреватель 12 и включает аварийную сигнализацию 15. Питание блока
осуществляется переменным однофазным током с напряжением 220 В при отклонении
от -15% до +10% и частотой 50/60 Гц при отклонении +/-2%.
Блок обеспечивает коммутацию электрических
цепей переменного тока напряжением до 250 В, частотой 50/60 Гц, мощностью до
100 ВА и СОС ф >0,7
а также постоянного тока напряжением до 250 В мощностью 100 Вт.
Программа централизованного контроля.
Для
работы ЦКС в составе систем управления инкубаторием была разработана программа SCKIFW, обеспечивающая выполнение компьютером изложенных выше
информационных и управляющих функций, построение графиков изменения температуры
и влажности посуточно и за весь период инкубации, создание и вывод на печать
сводок различного характера.
На
рис. 6.4. представлен вид основного рабочего окна программы.
На
рис. 6.5. представлены виды дополнительного рабочего окна и архивного окна
программы.
Разработанная
программа представлена на компакт-диске, прилагаемом к диссертации.
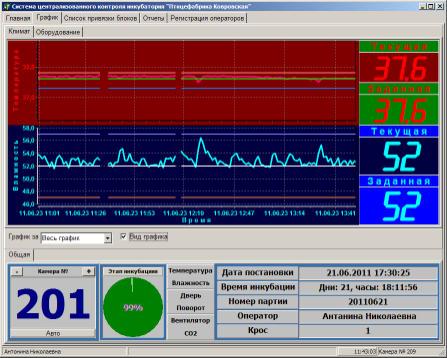
Рис. 6.4. Основное рабочее окно
программы SCKI.


а.
б.
Рис. 6.5. Дополнительное рабочее окна (а) и архивное
окно (б) программы SCKI
Список литературы.
1. Алексеев Ф.Ф и др. Промышленное
птицеводство. М.Агропромиздат, 1991;
2. Башарин А.В, Расчет и синтез нелинейных
систем управления. Госэнергоиздат МЛ,
I960 г;
3. Буртов Ю.З. Динамика относительной влажности
воздуха в промышленных инкубатора. Сб. трудов ВНИТИП, вып. 52, 1981
4. Буртов Ю.З. Динамика температуры
воздуха в промышленных инкубаторах. Сб. трудов ВНИТИП, вып. 54, 1982;
5. Валге А.М. Обработка
экспериментальных данных и моделирование динамических систем при проведении
исследований по механизации сельскохозяственного производства. СПб. СЗНИИМЭСХ,
2002.-176с.
6. Воронов А.А. Основы теории
автоматического управления. Изд."Энергия", М-Л 1965r.;
7. Давтян Ф.А. Управление
микроклиматом в птицеводческих помещениях. Ж. «Механизация и электрификация
сельского хозяйства», №11, 1984. с.35-38;
8. Диминг Д. Управление процессом
инкубации в XXI
веке. Ж. Сельскохозяйственный вестник, №5, 2002. с.7-9;
9. Дудников Е.Г. Основы
автоматического регулирования тепловых процессов, Госэнергоиздат, М. 1956г.
10.
Еременко
С.В. Инкубатор с микропроцессорной
системой управления. В кн. «Проблемы создания машин и оборудования для
животноводства и кормопроизводства». М., ВНИИКОМЖ, 1988. (Соавторы: Агеев Б.А.,
Радовицкий А.Л.), с. 191-195;
11.
Еременко С.В.
Инструкция по эксплуатации блока локальной сети и метрологической проверки
блоков управления инкубаторами БМИ-Ф-15.03. ВНИИКОМЖ, 1999г. 12с.;
12. Еременко С.В. Информационные системы нового поколения оборудования для промышленной инкубации яиц. Сб. докладов международной научно-технической конференции «Автоматизация сельскохозяйственного производства». М. 2004. 2 с.(соавтор: Шеповалов В.Д.);
13. Еременко С.В. Определение репрезентативной зоны размещения измерительных преобразователей в инкубационной камере. Сб. докладов международной научно-технической конференции «Автоматизация сельскохозяйственного производства». М. 2004. 5с.;
14.
Еременко
С.В. Сетевая АСУ ТП инкубатория. В кн. «Проблемы разработки автоматизированных
технологий и систем автоматического управления сельскохозяйственного
производства» М. ВИМ, 2002, с.221-222;
15.
Еременко С.В. Система централизованного
контроля инкубаторов. Сборник трудов ВНИИКОМЖ. М., 1985 (Соавтор Шугуров М.М.);
16.
Еременко С.В. Способ автоматического управления процессом сушки при
активном вентилировании сена. Авт.св. 1651061. М., Бюл. №19, 1991;
17.
Еременко
С.В. Экспериментальное определение параметров математической модели инкубационной
камеры как объекта управления по температуре. Сб. докладов международной
научно-технической конференции «Автоматизация сельскохозяйственного
производства». М. 2004. 4с.(соавтор: Шеповалов В.Д.);
18.
Еременко С.В. Этапы автоматизации машин и
оборудования для животноводства и кормопроизводства. Сборник трудов ВНИИКОМЖ.
М., 1999 (Соавторы: Шугуров М.М., Федоров А.В., Радовицкий А.Л.), с. 148-166;
19. Еременко С.В. Инструкция по монтажу блока БМИ-15.03 на инкубаторах..М., ВНИИКОМЖ, 1992г. 3с. (Соавтор: Каленик С.Н.);
20. Еременко С.В. Новый Российский инкубатор Эльбрус‑2002. Проспект выставки «Золотая осень 2003. М., 11 с..(соавторы: Воронцов А.Н., Стругунов Л.Н.);
21.
Еременко
С.В. Система управления инкубатором. Авт. свид. № 1644850 М. Бюл. №16, 1991 (Соавторы: Шугуров М. М., и
др.) ..
22.
Еременко С.В. Сотрудничество. Ж. «Птица и птицепродукты», №1, 2002.с.2‑5.
(соавторы: Воронцов А.Н., Пахомова Т. И.);
23.
Еременко С.В. Устройство раздачи корма. Авт.св. 1690635. М., Бюл. №42,
1991;
24.
Заика
С.А. Пути улучшения санитарно-гигиенических условий инкубации куриных яиц в
промышленном инкубатории. Автореферат, 1988;
25.
Иоффе
Г.С, Эдйс А Л.. Камера инкубатора как объект регулирования температуры и
влажности, ж. "Механизация и электрификация социалистического сельского
хозяйства",№1, М , 1966г;
26.
Кондратьев P.M. Тепловые измерения, Машгиз, М-Л,
1957г.
27.
Костяшкин
Л.Н. Математическая модель инкубации яиц и вопросы ее реализации. Ж.
«Механизация и электрификация сельского хозяйства», №1, 1984. с.42-46;
28. Крылов А.Н. Лекции о приближенных вычислениях. Изд. Шестое. Гос. Издательство технико-теоретической литературы. М. 1954;
29. Лев М Л. Основы теории и расчета инкубаторов. М. Машиностроение, 1972;
30. Лев М Л. Устройство для измерения коэффициента теплоотдачи содержимого инкубируемого яйца. А.с. №161544;
31.
Лев
М.А Расчет и контроль воздухообмена в инкубаторе, Ж. "Птицеводство",
№1, 1964г;
32. Лев М.А. Основные вопросы автоматического регулирования режимов инкубации, Научные труды, ВИЭСХ...М.1961г;
33. Лукъянов В.М. Что объединяет и отличает новое отечественное и зарубежное птицеводческое оборудование? Ж. «Техника и оборудование для села, №11-12, 1998г;
34. Минина О.М. Определение динамических характеристик и параметров типовых регулируемых объектов. Изд.АН СССР, М.!963г;
35. Нестеренко А. В. Экспериментальные исследования тепло- и массообмена при испарении жидкости со свободной поверхности, Ж. "Техническая физика, АН СССР, т,24,№ 4,1954г.;
36.
Нестеренко
А.В. Основы теплодинамических расчетов вентиляции и кондиционирования воздуха,
М. "Высшая школа", 1985г.;
37.
Орлов
М. В Изучение и разработка режима инкубации яиц уток и кур в инкубаторе
"Универсал--45-. Труды ВНИИП;
38.
Орлов
М.В. Методы дифференцирования режима инкубирования яиц сельскохозяйственной
птицы. Тр. ВНИТИП.. т.27, 1961;
39. Отрыганьев Г.К. Хмыров В.А, Колобов Г.М.., - Инкубация. Изд."Колос, М. 1964г.;
40. Отрыганьева А. Значение периодических понижений температуры при инкубации и выращивания молодняка. Автореферат, М. 1985 ТСХА;
41.
Попов
Е. П, Бессекерский В.А - Теория систем автоматического регулирования. Изд.
"Hayка",
1966г.;
42.
Смирнов
В.И. Высшая математика, т.III,
ч.1. Из-во технико-теоретической литературы, М. 1957;
43.
Стефани Е.П. Основы расчета настройки
регуляторов теплоэнергетических процессов. Росэнергоиздат, М-Д. 1960г.
44.
Температурные
поля камеры и яйца в лабораторном инкубаторе, Ж. «Механизация и электрификация
с.х.», №5, 1987;
45.
Третьяков
И.П. -Инкубация. ГИСХЛ, М. 1953г.;
46.
Третьяков И.П.- Влияние
переменных температур на развитие яиц. Труды ВНИТИП т.24,
Сельхозгиз, М. 1954r.;
47.
Третьяков
И.П. Улучшение качества двухпозиционного регулирования тепловых процессов.
Филиал Всесоюзного института научно-технической информации, тема 24, М,, 1959г.;
48.
Фисинин
В.И. Журавлев И.В. Секреты куриного яйца. Ж. «Наука в СССР», №5, 1991;
49.
Хаскин
B.В.-
Теплообмен и развитие терморегуляции в онтогенезе домашней утки. Диссертация
1961г.;
50.
Церих Ф. А. ‑ Исследование и
применение полупроводниковых термосопротивлений для дистанционного контроля
инкубаторных установок. Диссертация 1961г.;
51.
Шарейко
А.В. Продуктивность бройлеров в зависимости от температурно-влажностного режима
инкубации. Автореферат ВНИТИП, 1994;
52. Эйдис А Л. Автоматизация инкубаторов. М, НИИАВТОСЕЛЬХОЗМАШ, 1966г.;
53.
Эйдис
А. Л..- Получение математического описания камеры инкубатора как объекта систем
регулирования. Труды ВИСХОМ. Вып.49. М.. 1966г.;
54.
Эйдис
А.Л.. К вопросу точности регулирования основных параметров инкубации. Труды
ВИСХОМ, вып.49, М.,1966г.;
55.
BAROTT N.G. Effect of temperature, humiditi, and other
factors on natch of hens' eggs and on energy metabolism of chick
embryos» -Technical Bulletin. Washington, 1937 № 533.;
56.
BYERLY Т.
Effect of different incubation temperatures on marality of chick embryos
-Poultry Science, 1938, vol. 17,
N 3, p. 200 - 205.;
57.
Kooijman S.A.L. What the hen can tell about her eggs:
egg development of the basis of energy budgets. “ J. Math. Biol.” 1986г. 23. №2,
с.
163-185;
58.
KUHE Н.
Entwicklűimg und Erprobung neuer Brutmaschinen. - Deutsche Agrartechnik,
1965. № 5;
59.
STREYC V. Neu Methode der Häherung der Differential
gleichungen von Regelstrecken bei allemeinem Eingang signal. - Acta Technica,
1958, № 4.
|
|

|
|
|
|
|